Robot Design Story
Consistency, Reliability, and Control—On Purpose
This page explains how we evolved our robot hardware, built a mission strategy, and refined programming so our robot performs predictably under competition conditions.
Definitions used throughout this page
Consistency = the robot repeats the same action the same way across many trials (different speeds, distances, battery levels).
Reliability = the robot completes intended tasks successfully without frequent failures or “surprise behavior.”
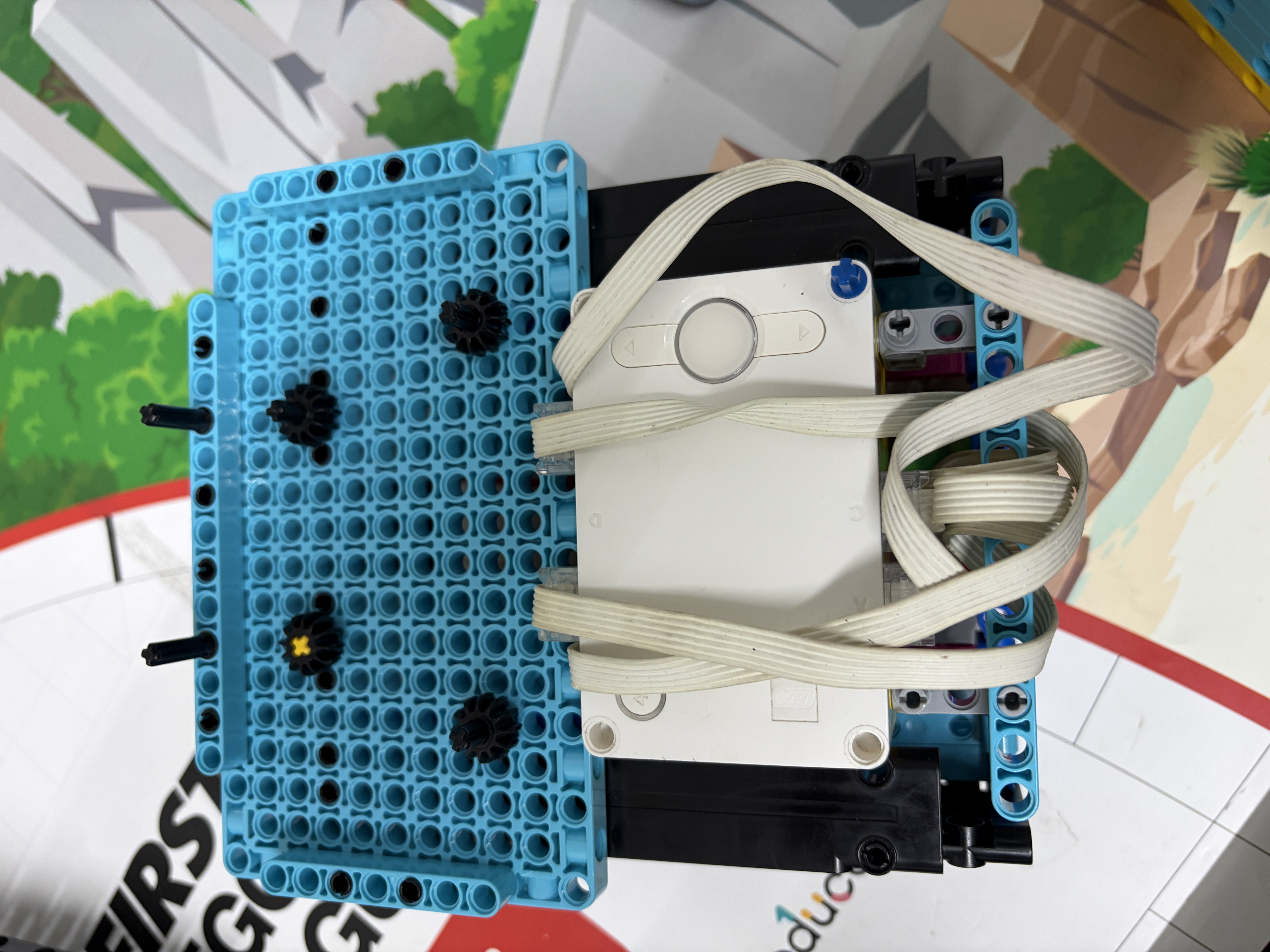
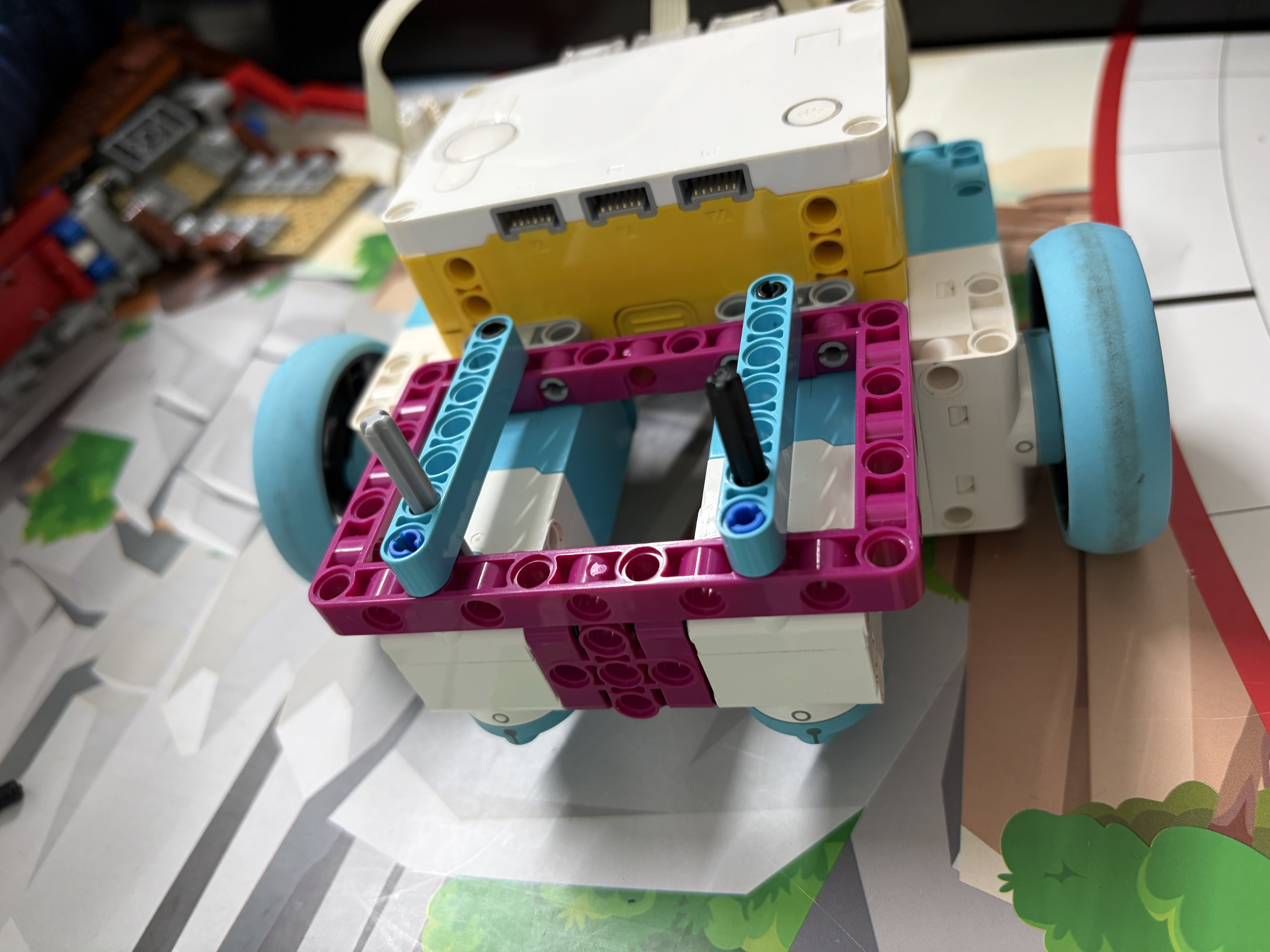
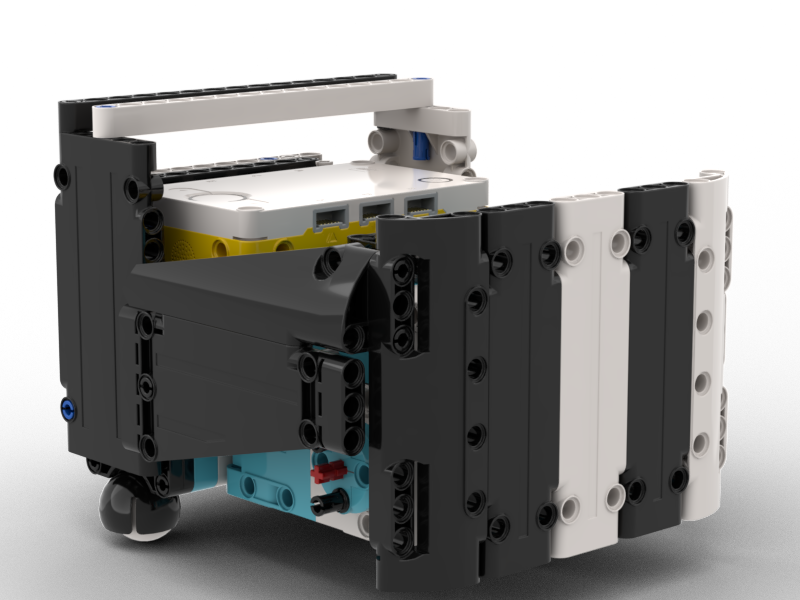
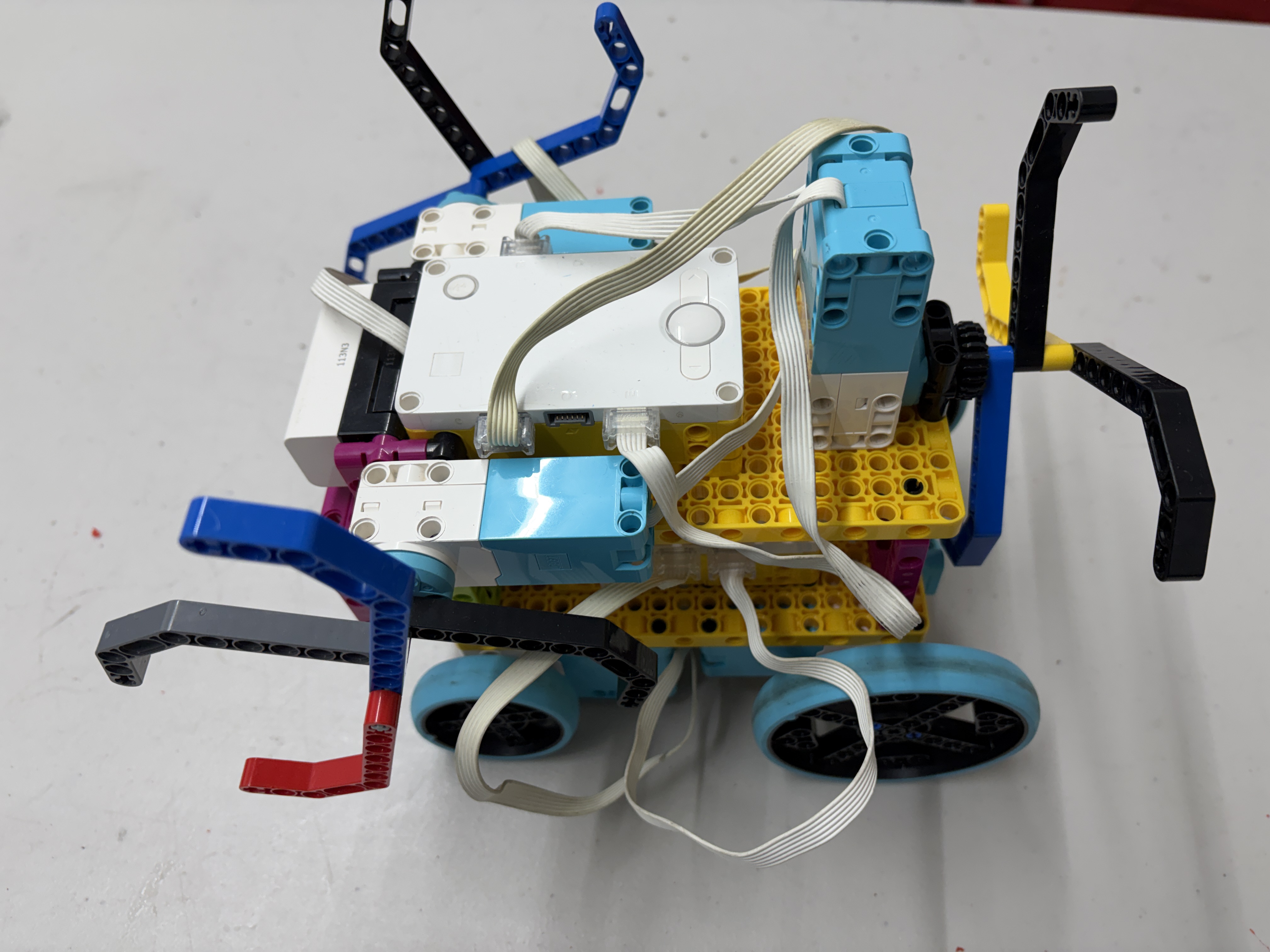
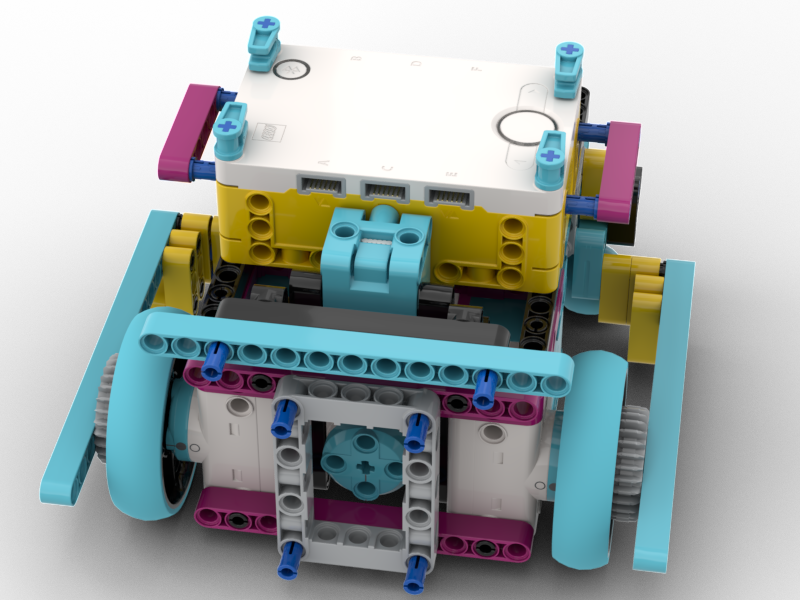
Stable hardware
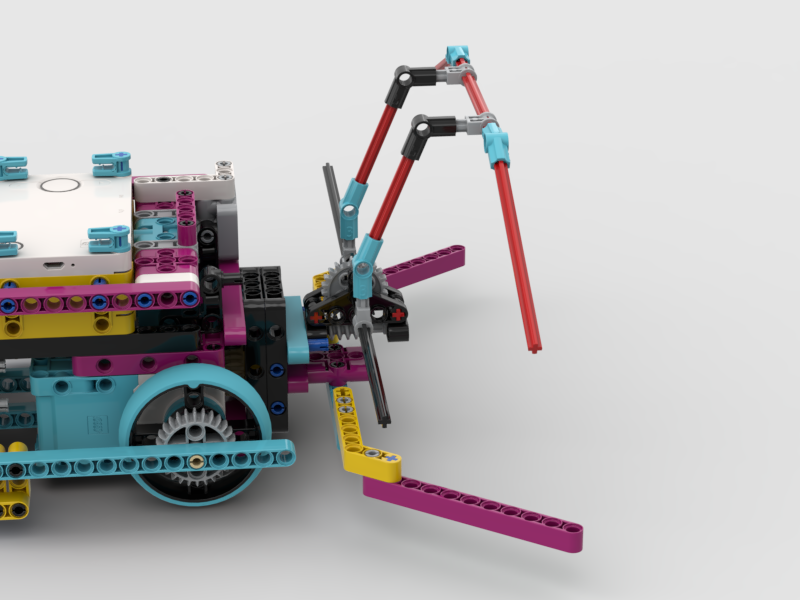
Smart mission grouping
Sensor-based corrections
.png)