| Owen |
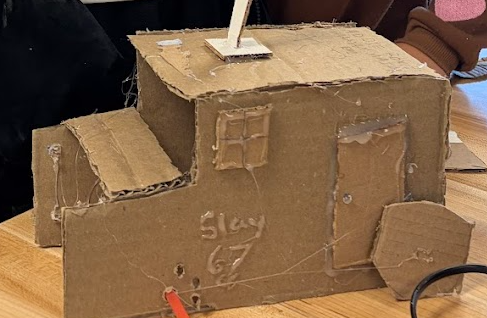
Cardboard mock sizing, wheelbase, and component placement |
09/14/2025 |
Complete |
Cardboard models photo; tunnel clearance check |
Compare against LEGO chassis size |
| Owen |
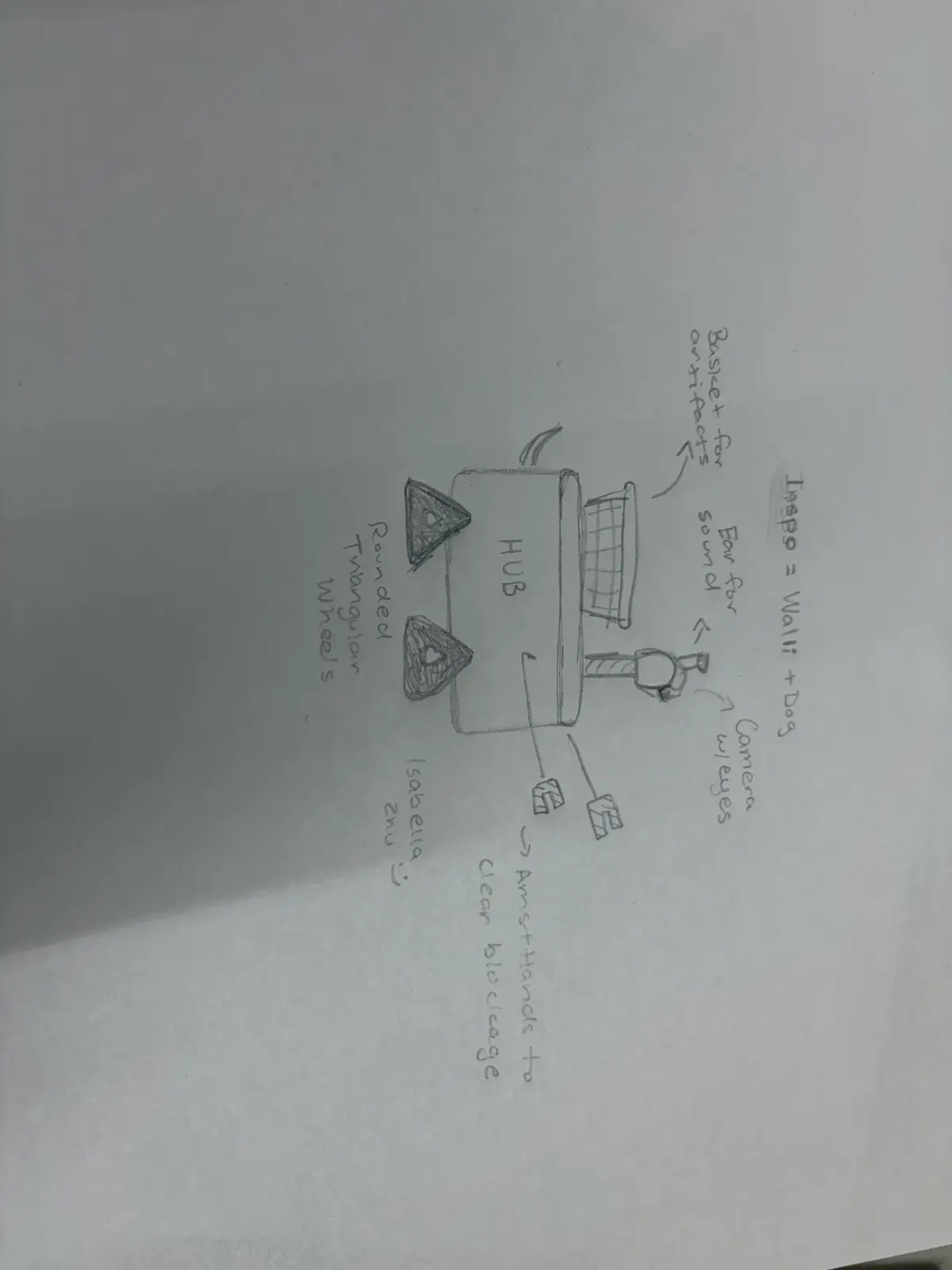
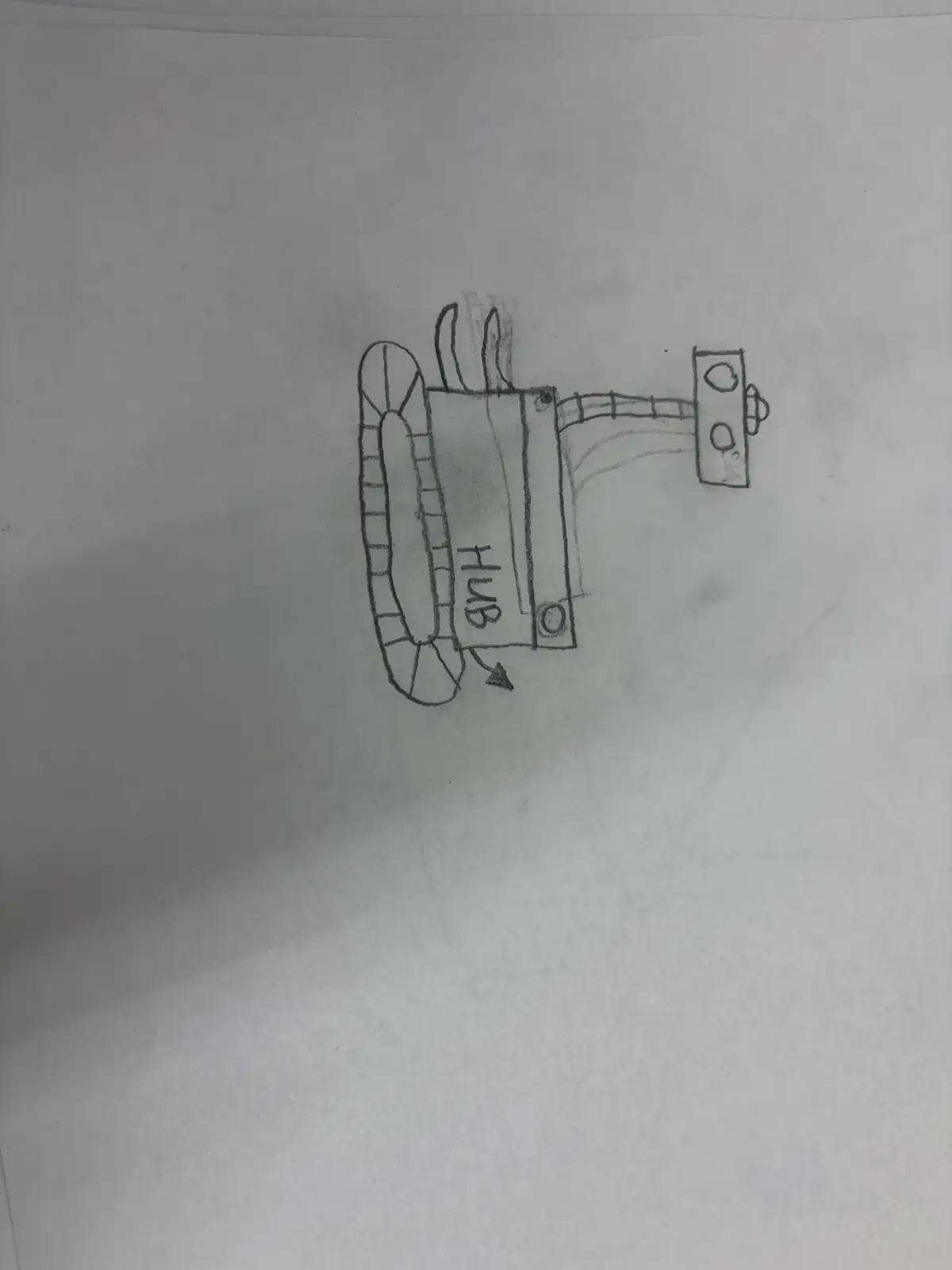
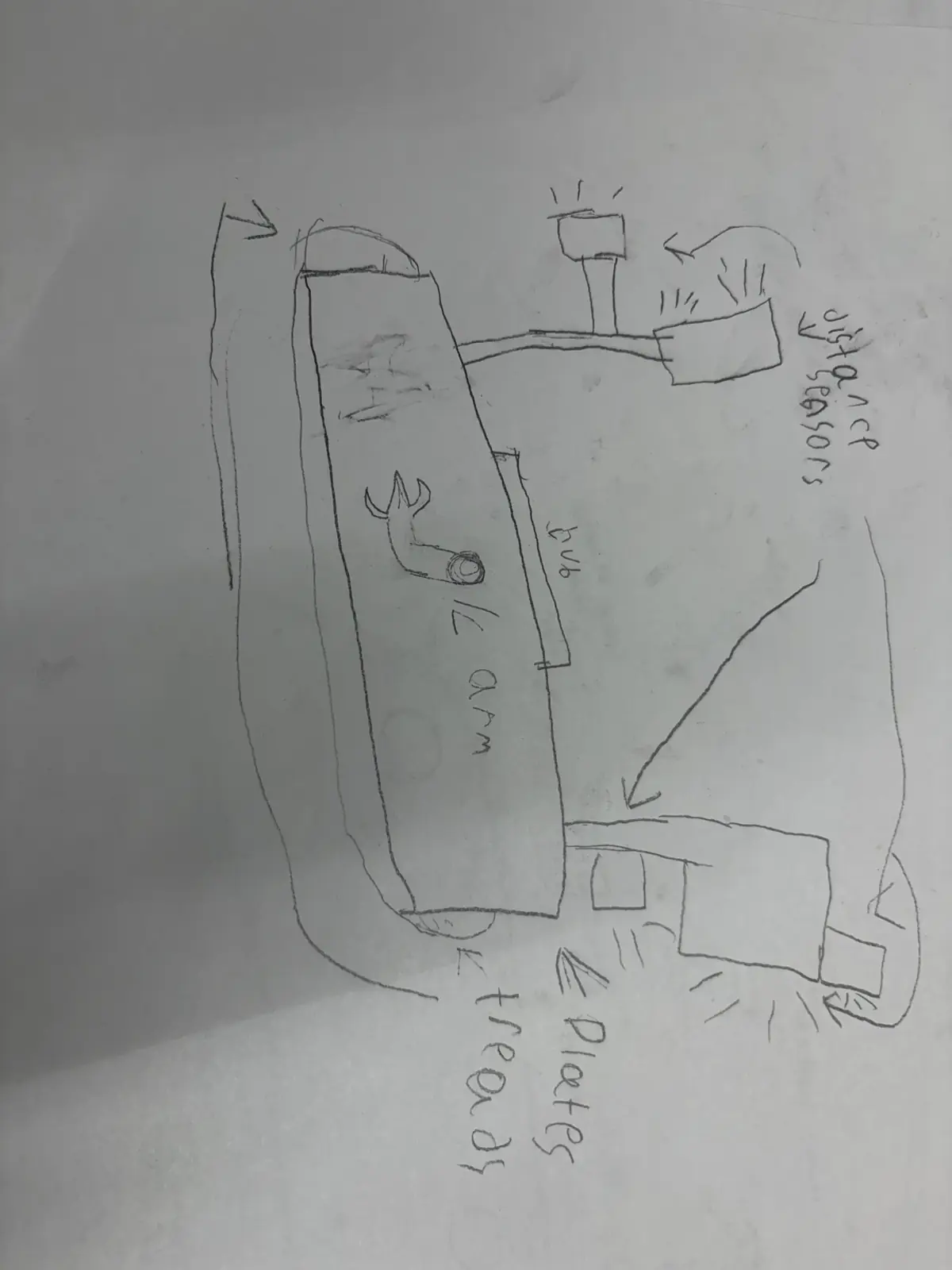
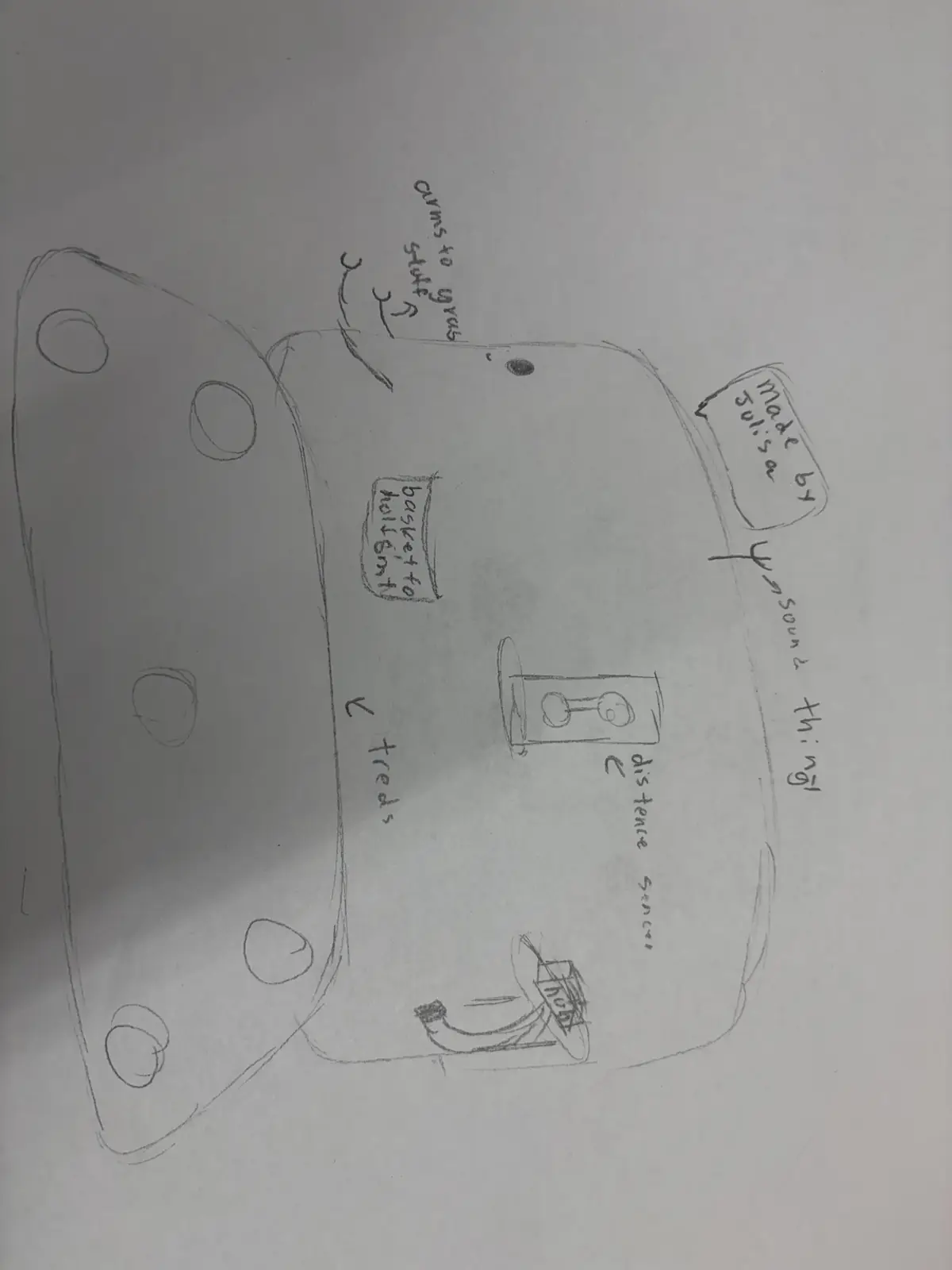
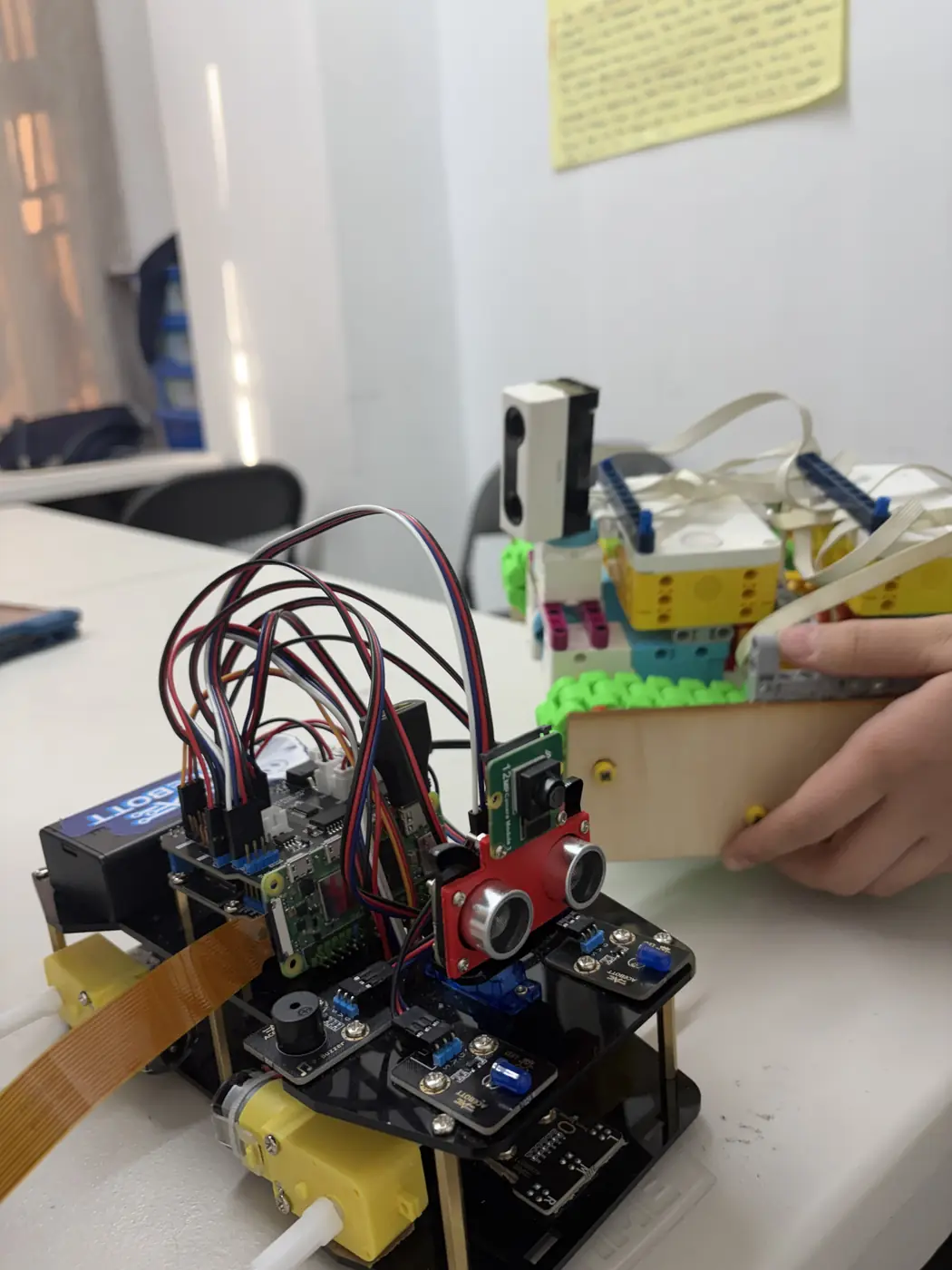
Component layout map (motors, hub, sensors) |
09/21/2025 |
Complete |
Placement sketch + photos |
Confirm cable routing paths |
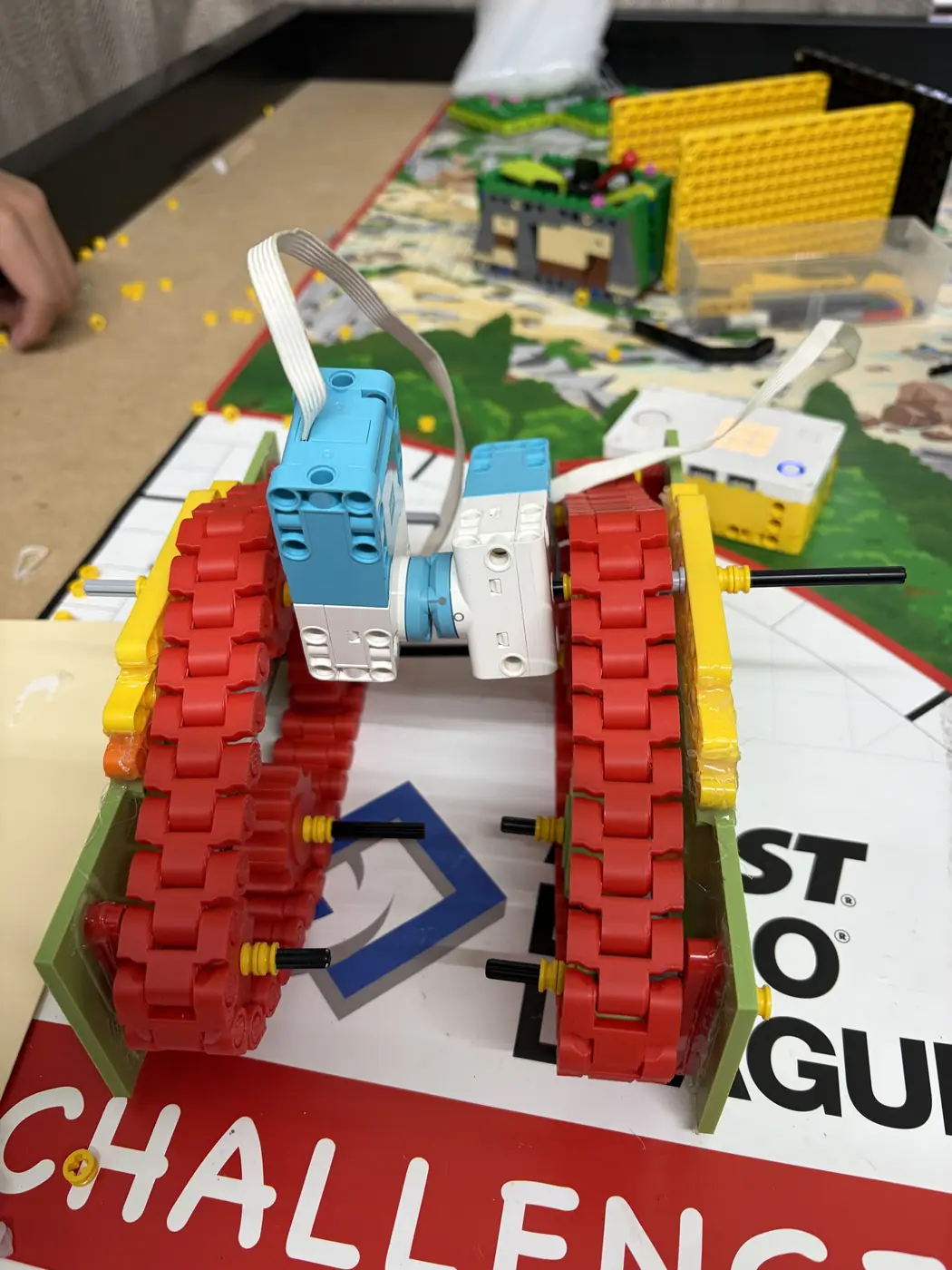
| First-year FLL participant |
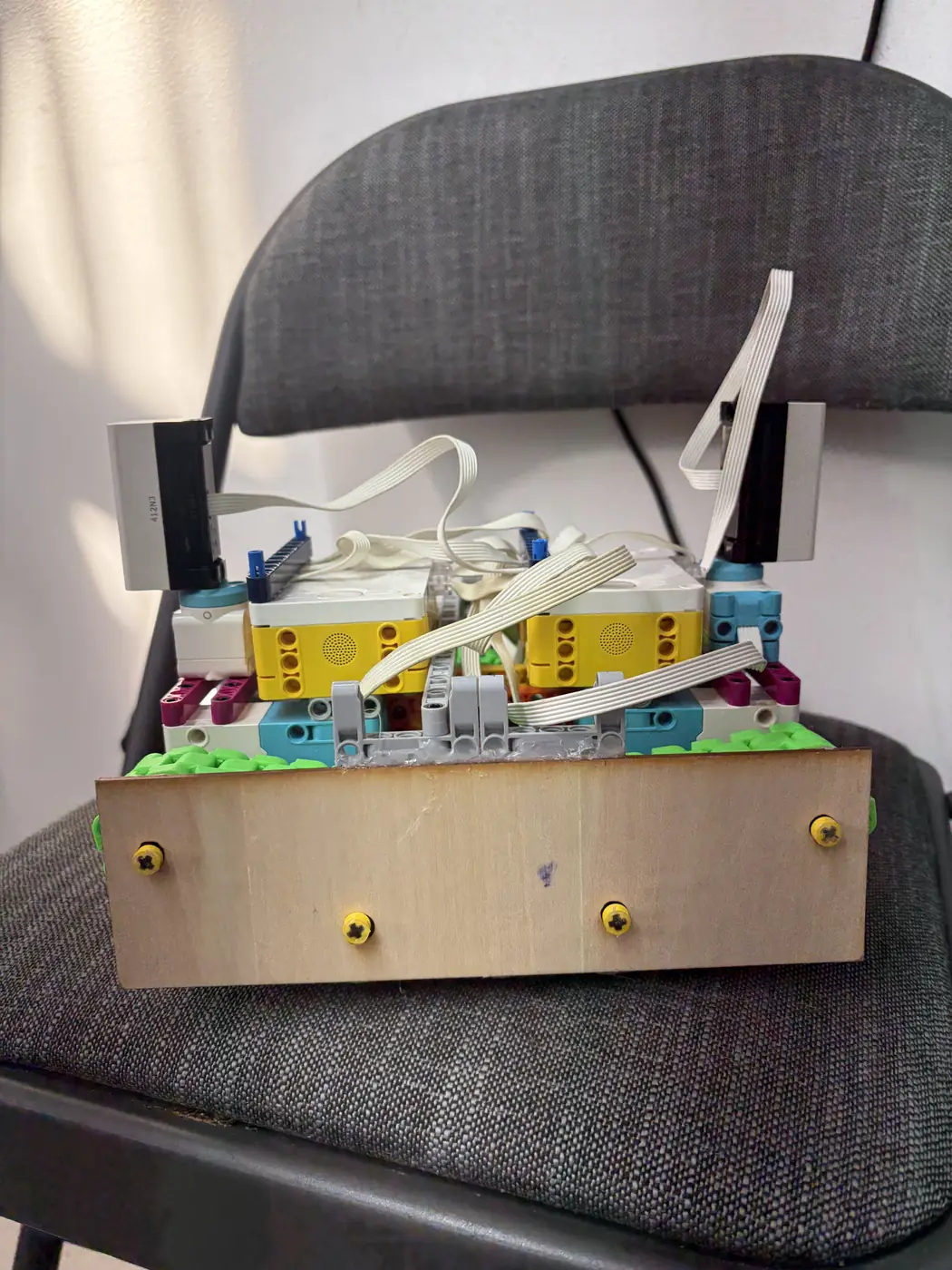
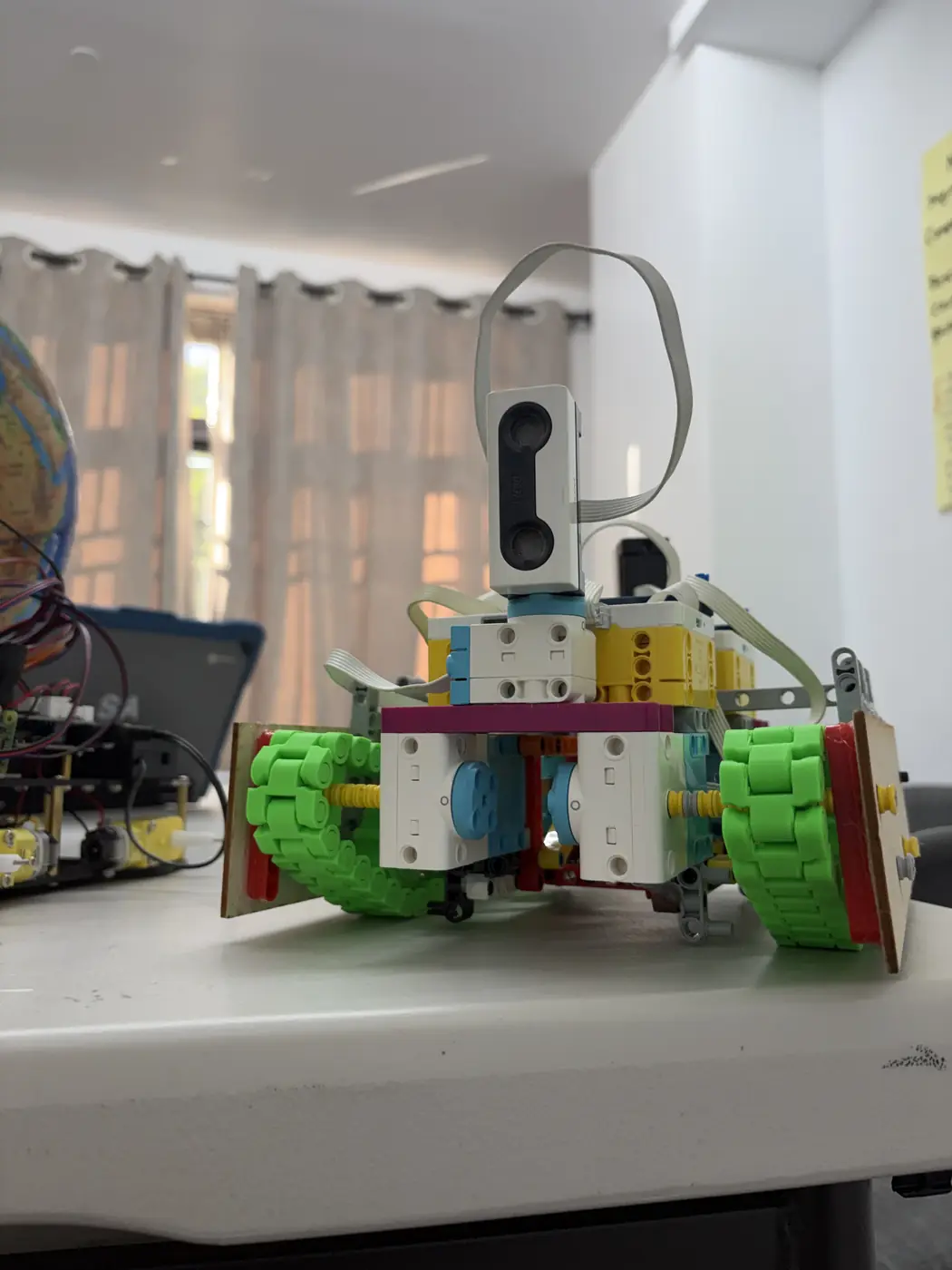
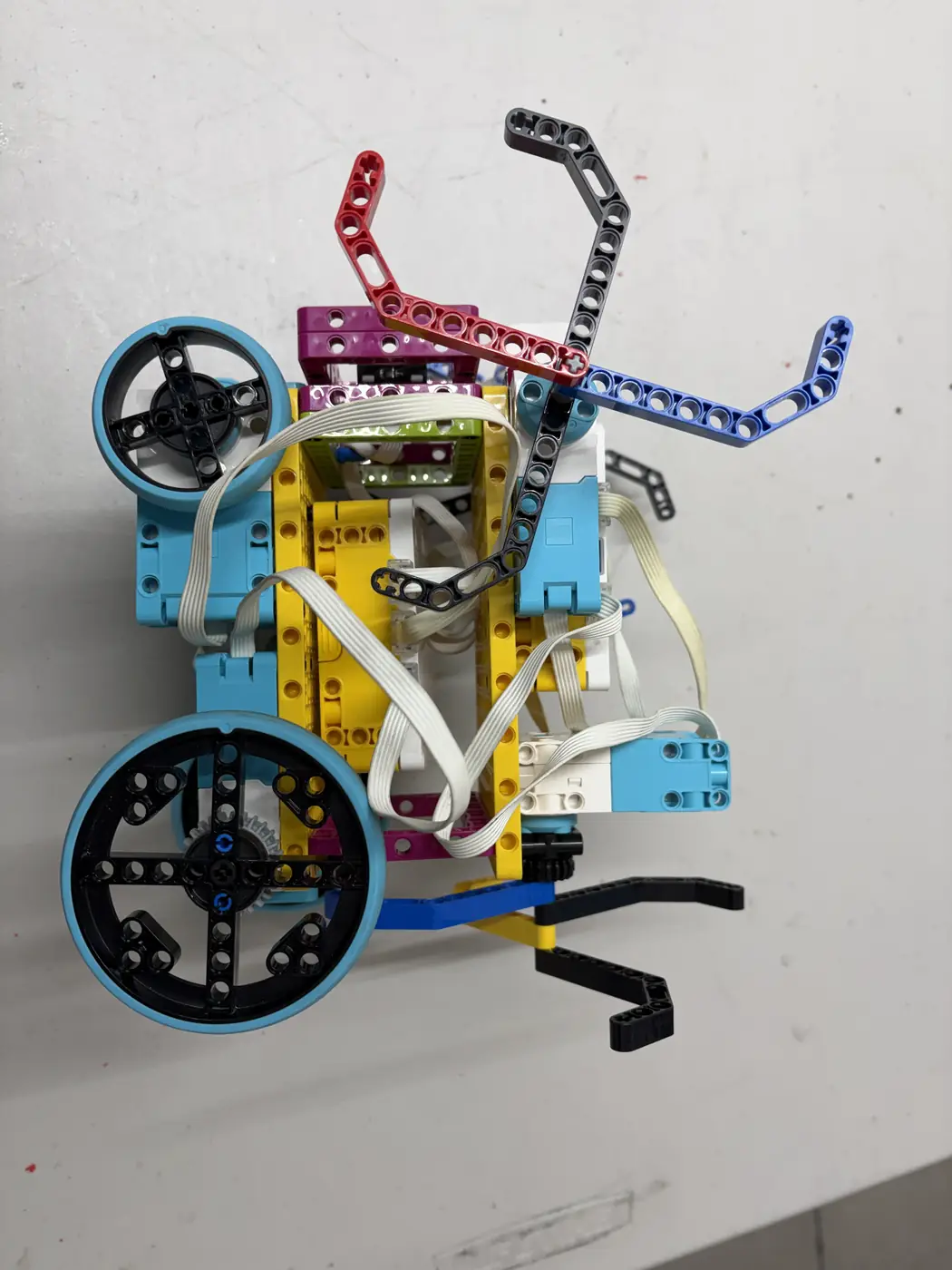
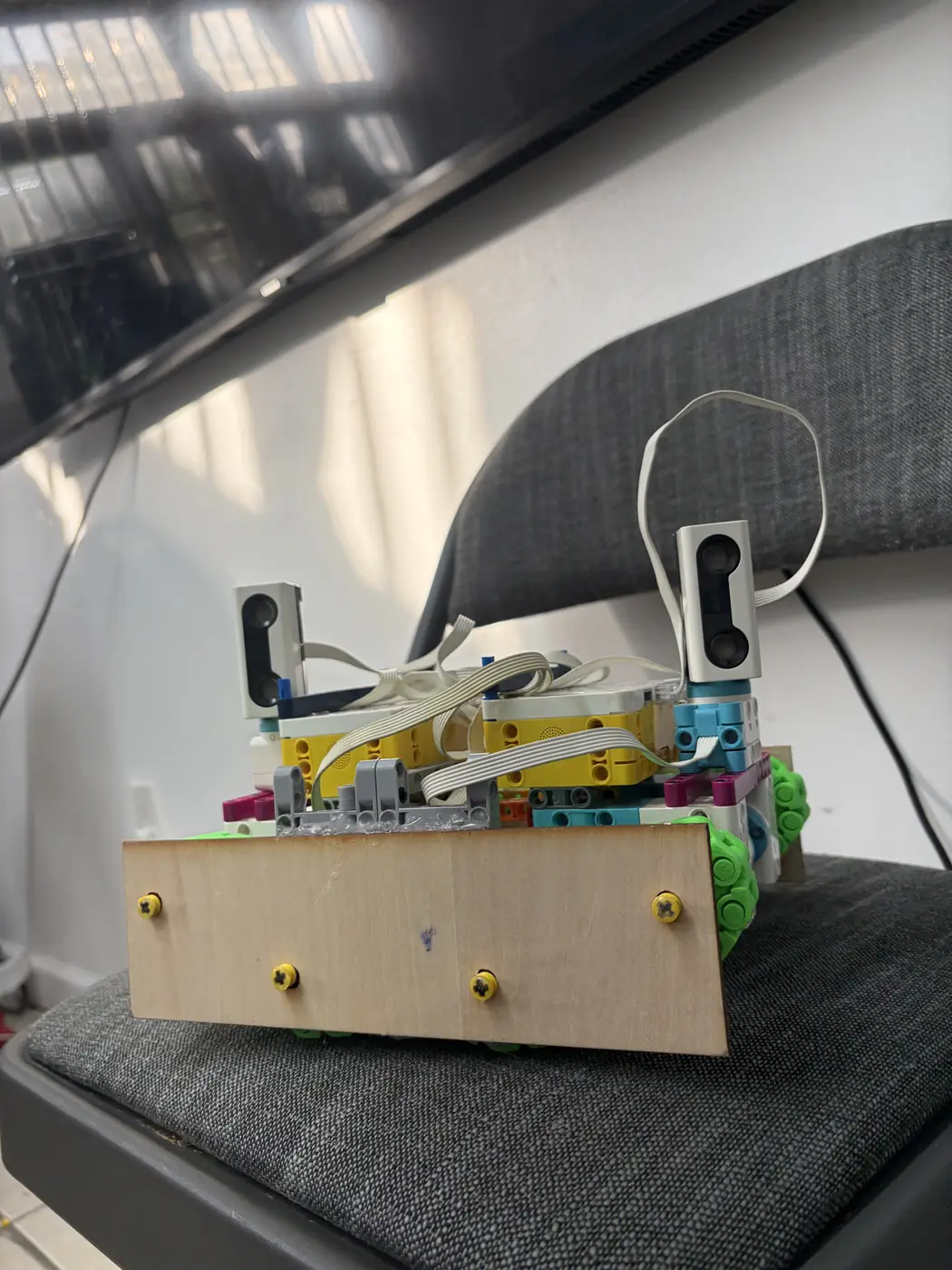
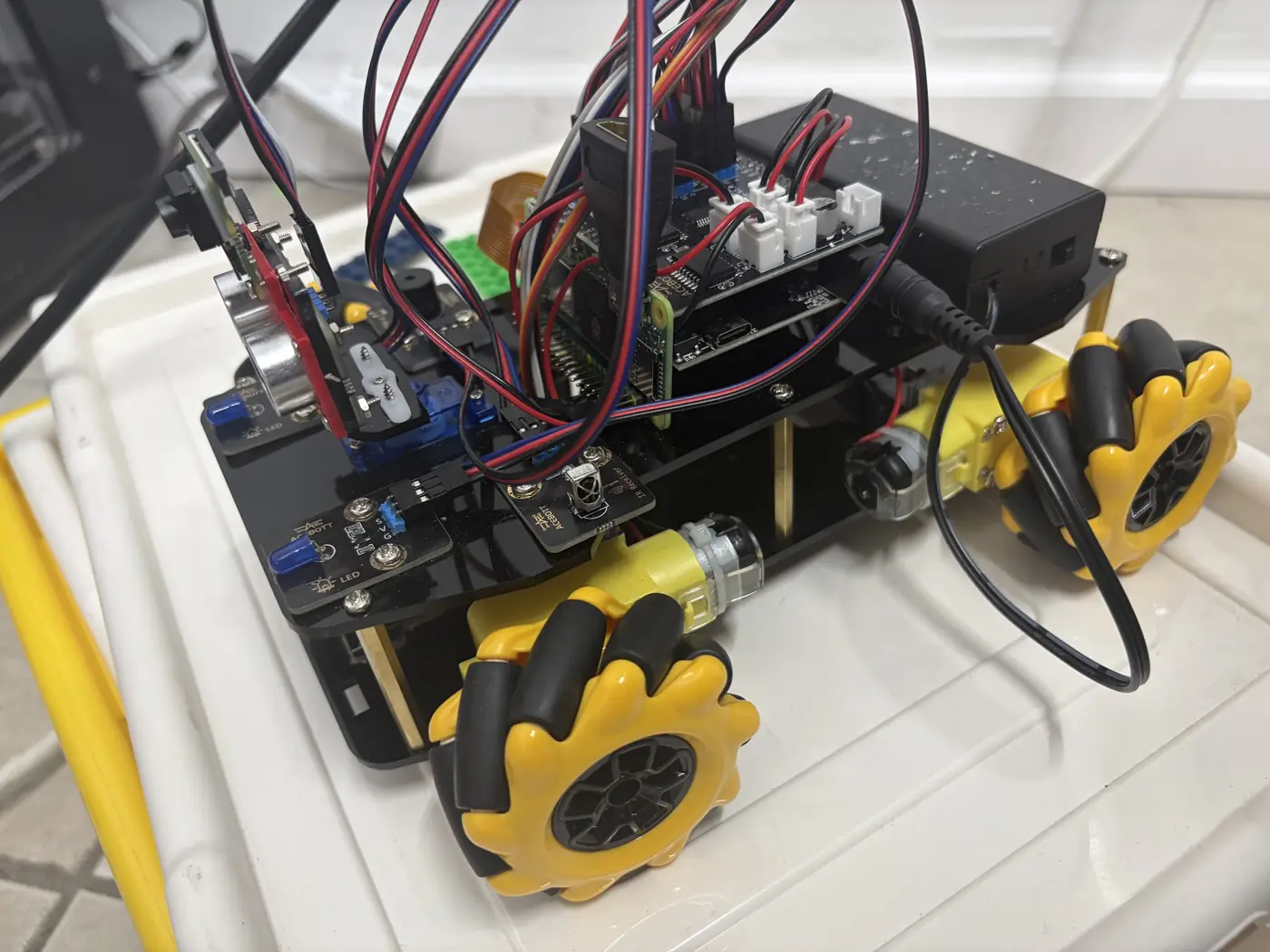
LEGO drivetrain assembly + stability baseline |
09/28/2025 |
Complete |
LEGO prototype photos; short movement trial |
Adjust bumper height and wheel clearance |
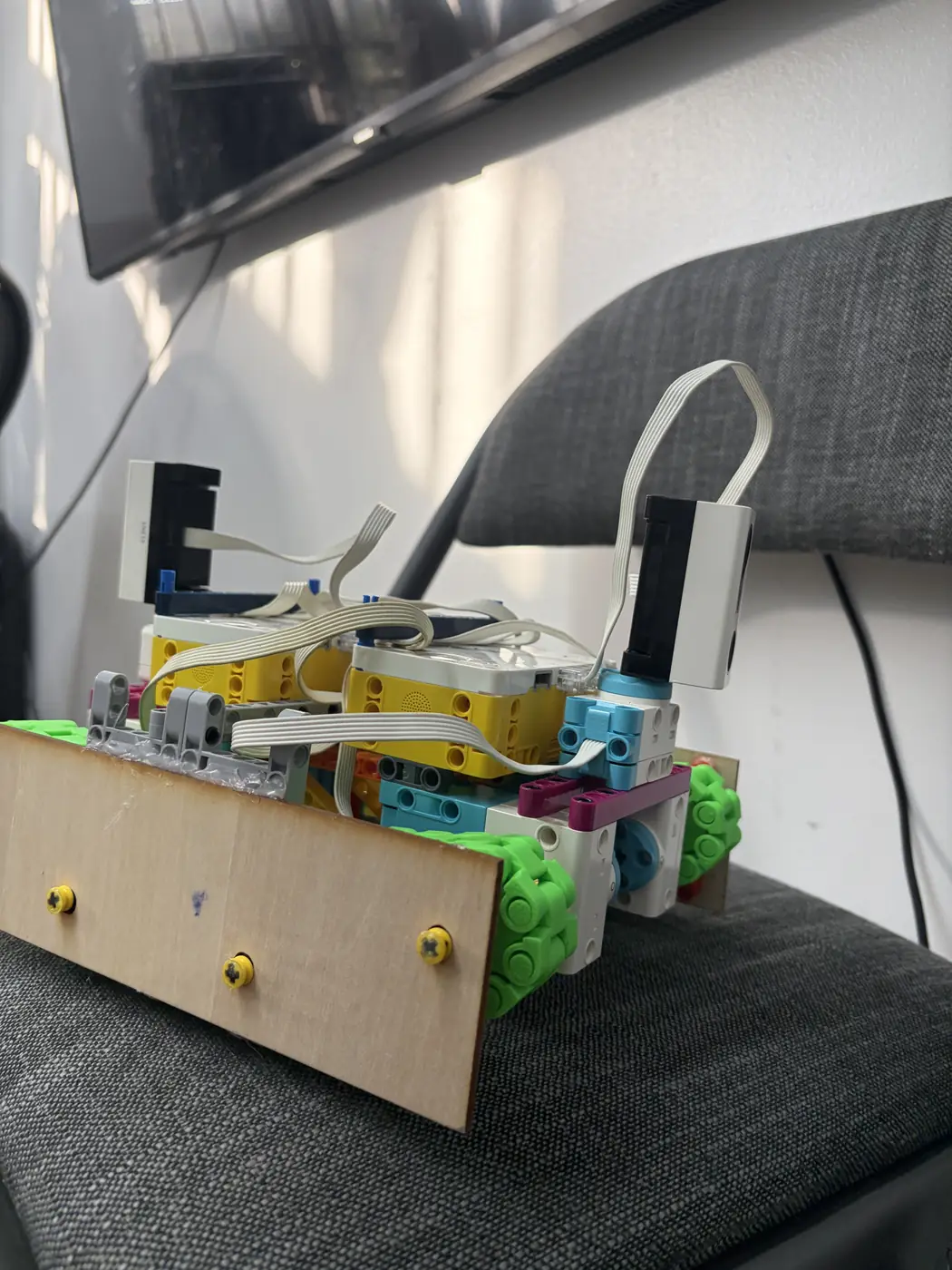
| First-year FLL participant |
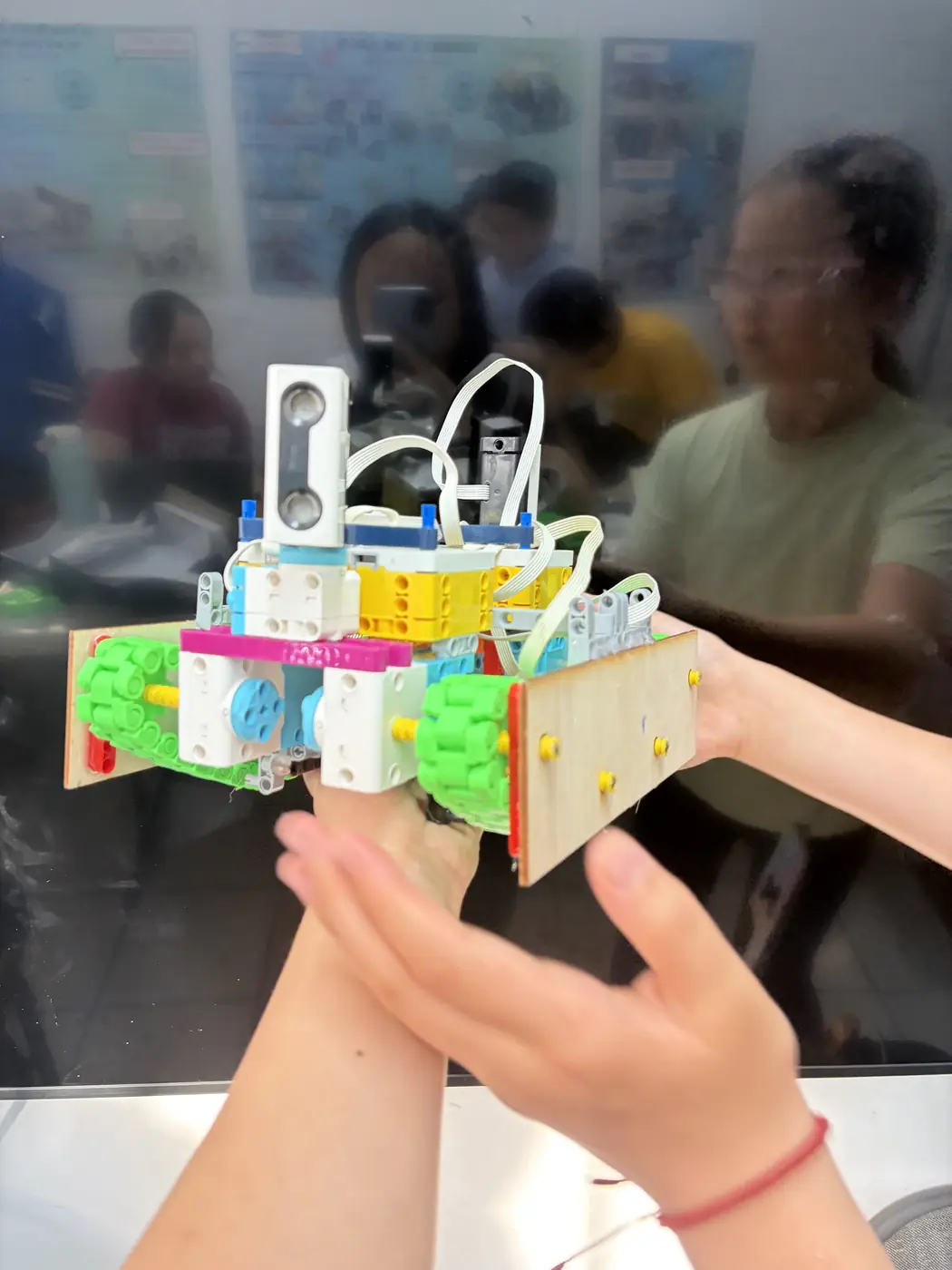
Rebuild for tighter turning radius |
10/05/2025 |
Complete |
Photo + notes on turning test |
Share changes with CAD team |
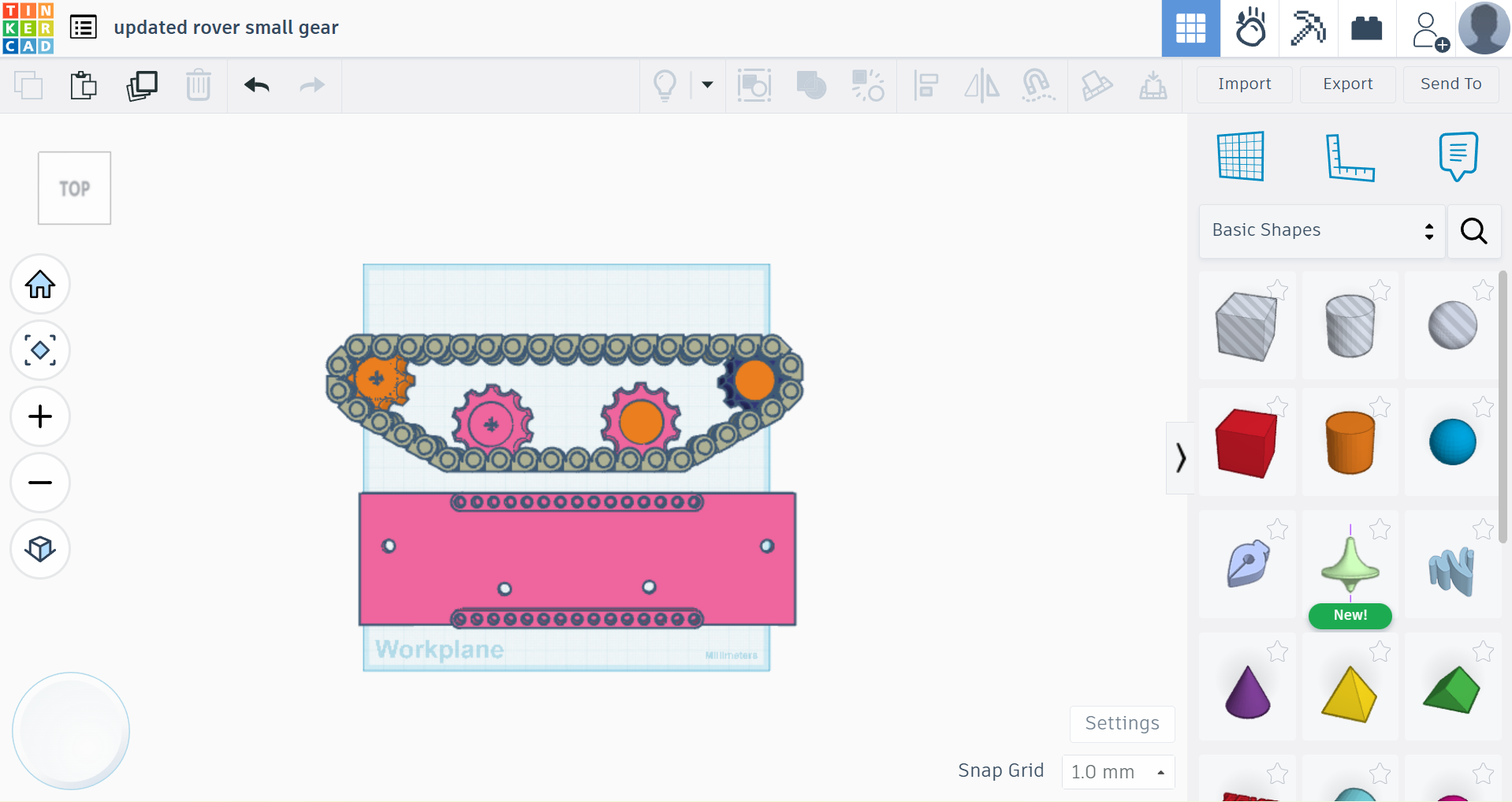
| Isabella |
CAD: tread design + mounting brackets |
10/12/2025 |
Complete |
Tinkercad screenshots; print preview |
Print test piece for fit |
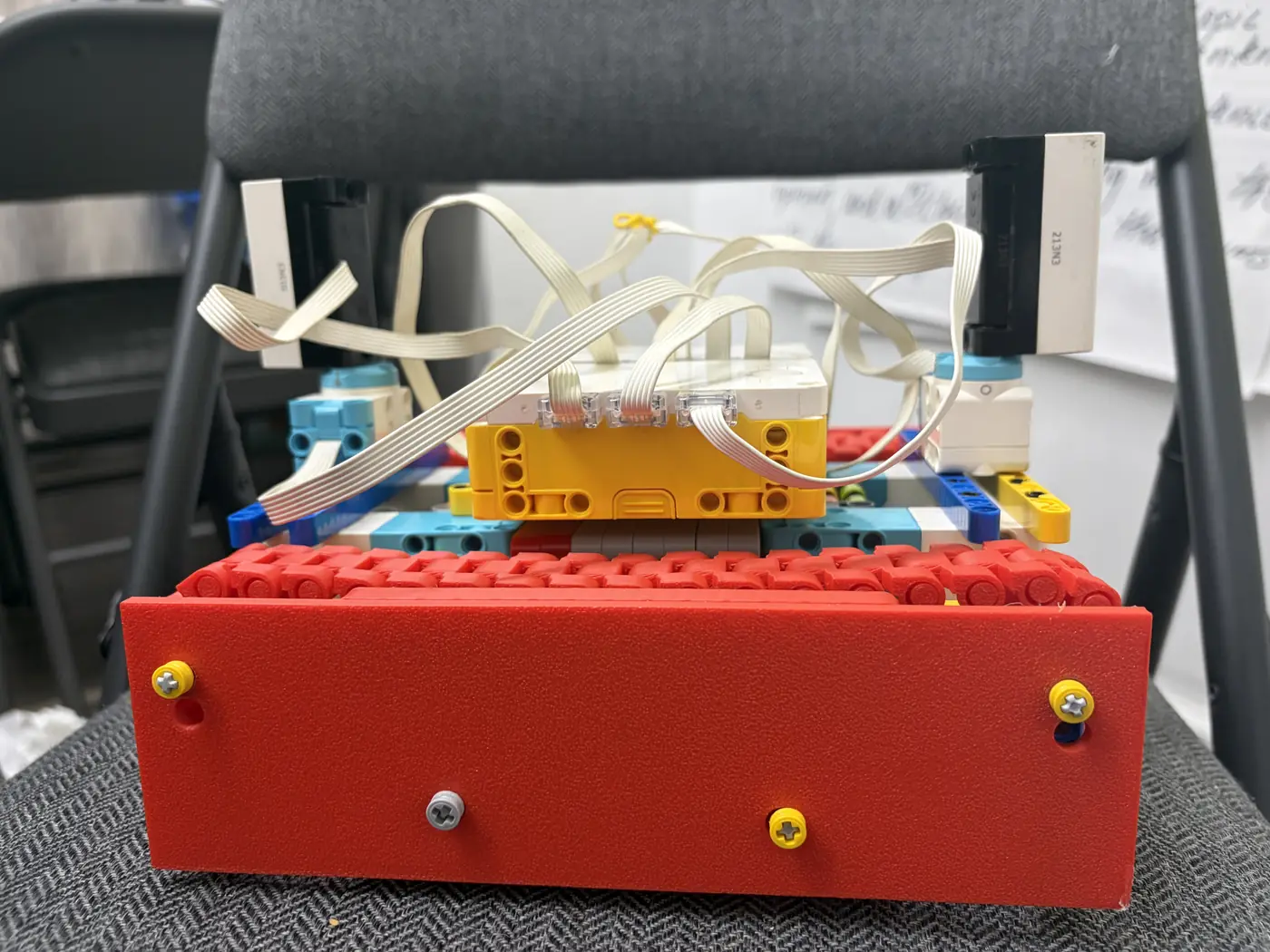
| Isabella |
CAD: protective plate + sensor mount revisions |
10/26/2025 |
Complete |
Fit check photos; mounting notes |
Finalize print settings |
| Jonathan |
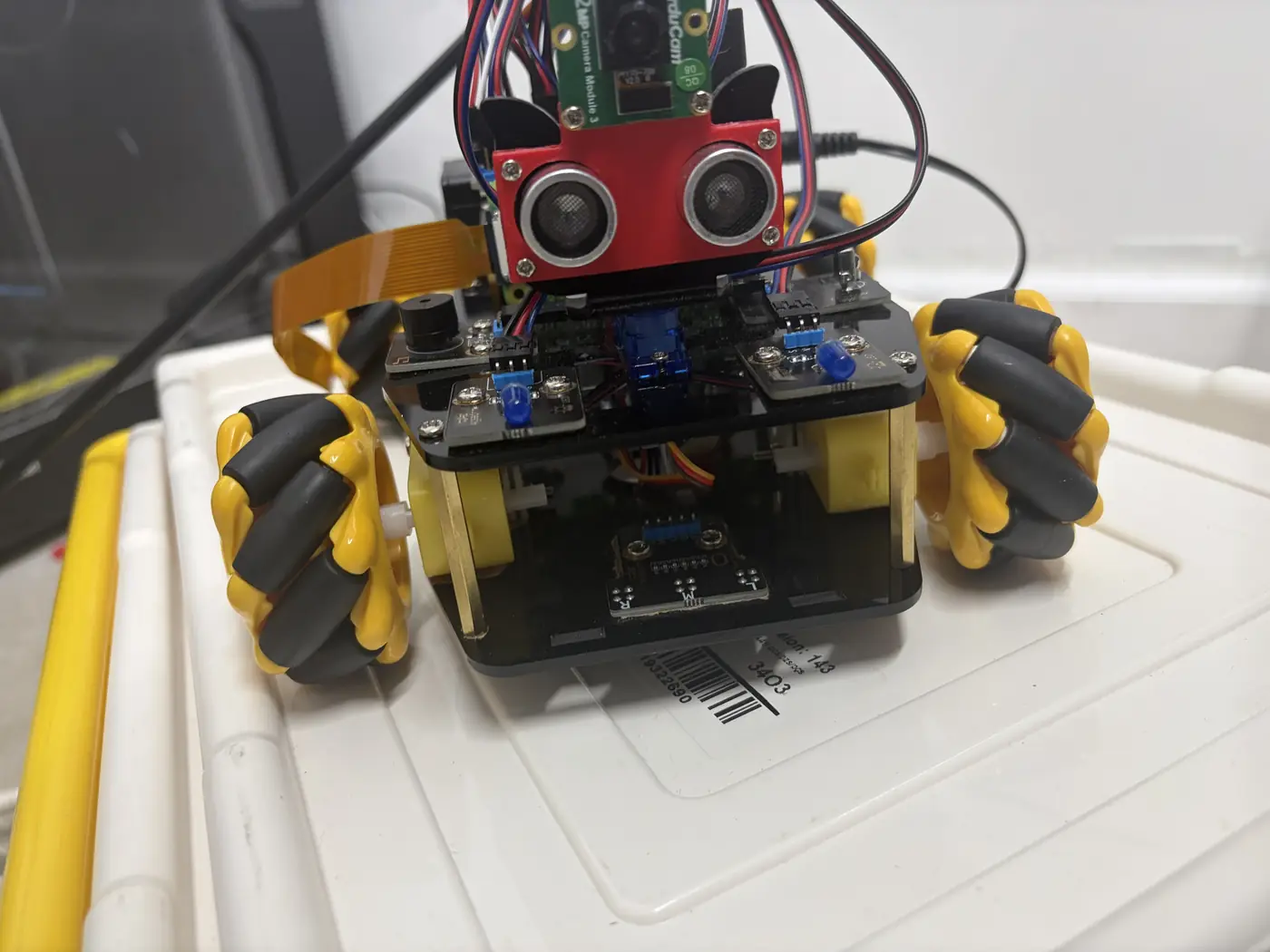
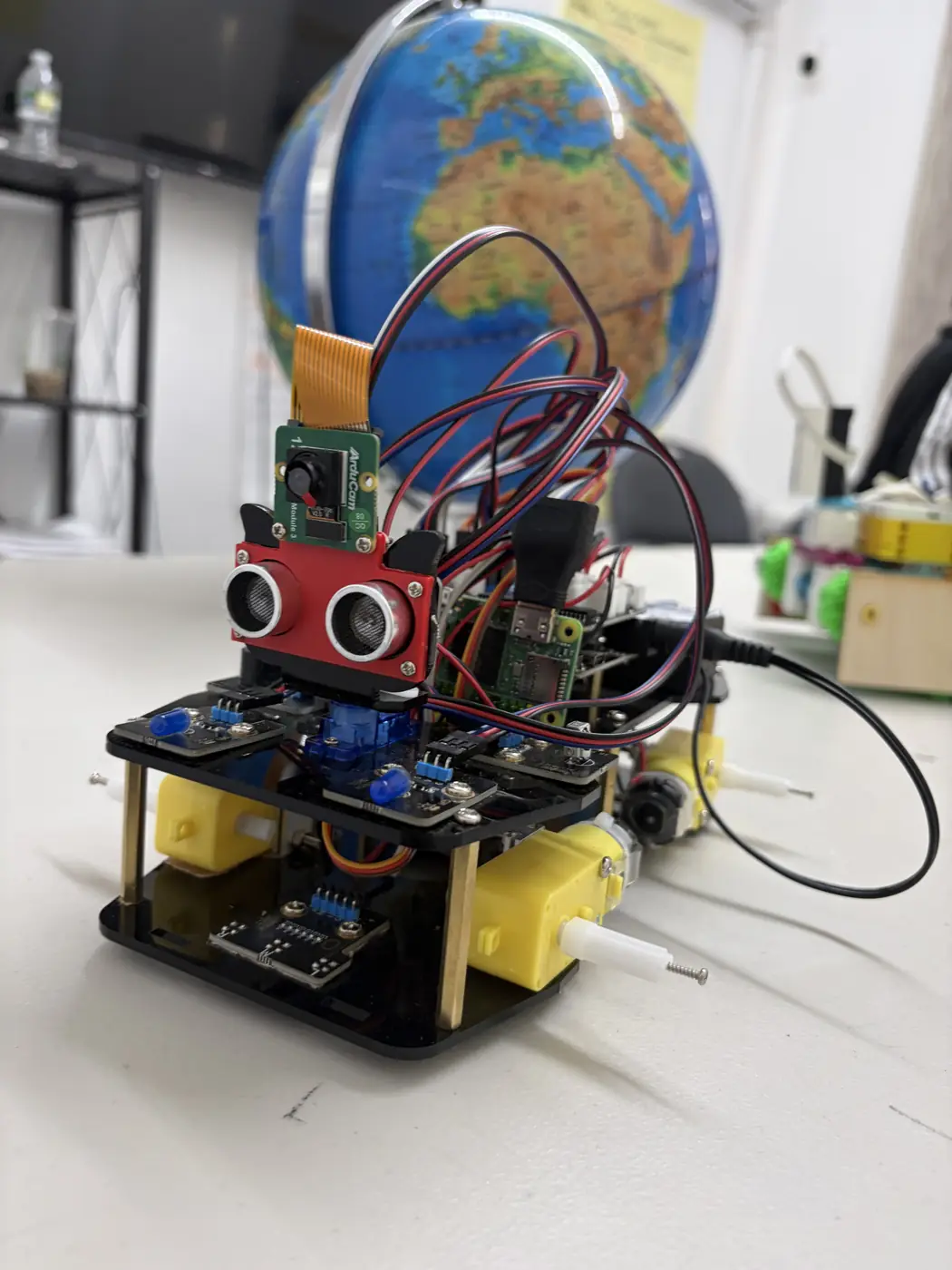
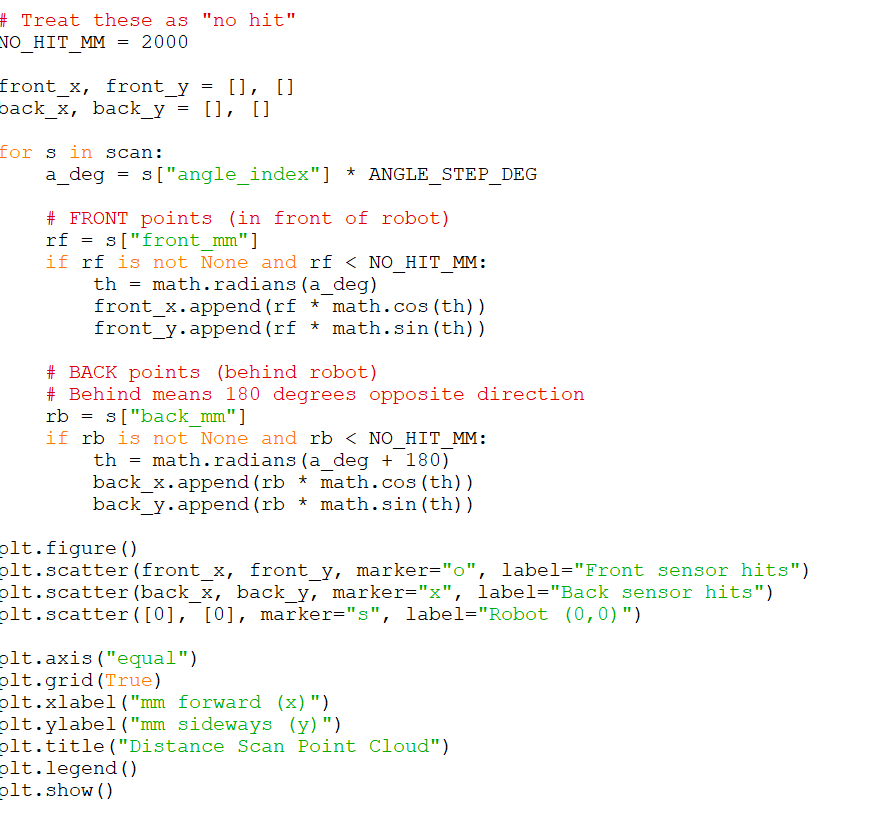
Programming: camera frame processing + obstacle logic |
11/09/2025 |
Complete |
Code screenshots; camera hallway test log |
Tune low-light exposure and frame rate |
| Jonathan |
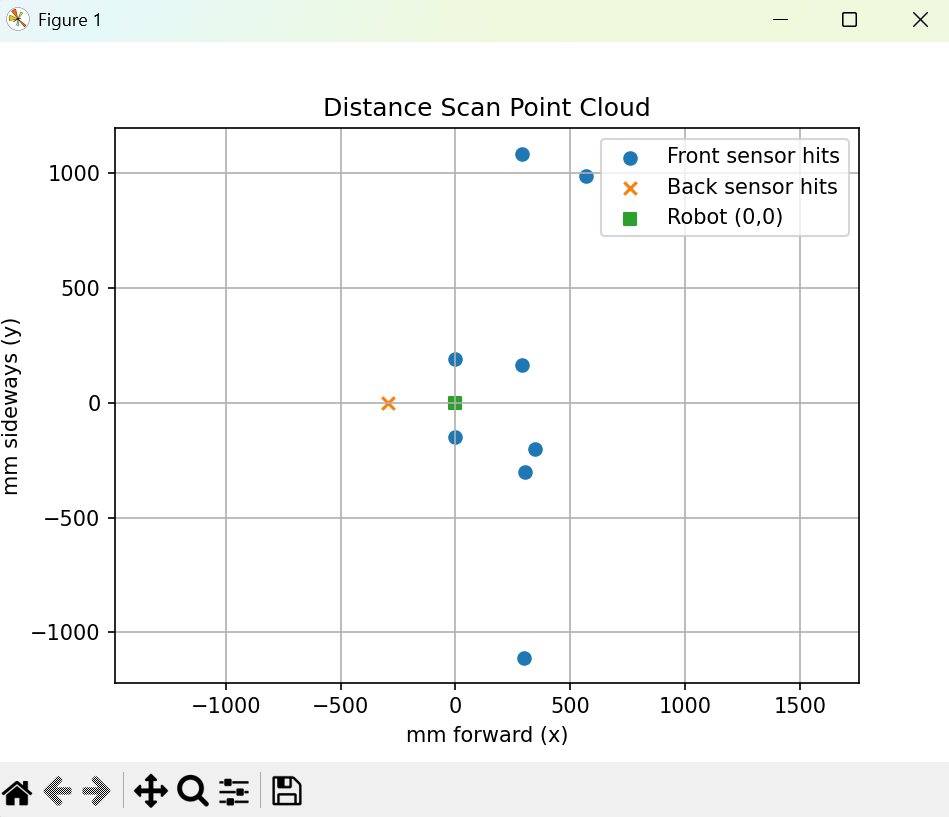
Programming: map logging for VR pipeline |
11/23/2025 |
Complete |
Sample map exports + test run |
Integrate export format with VR viewer |
| Team |
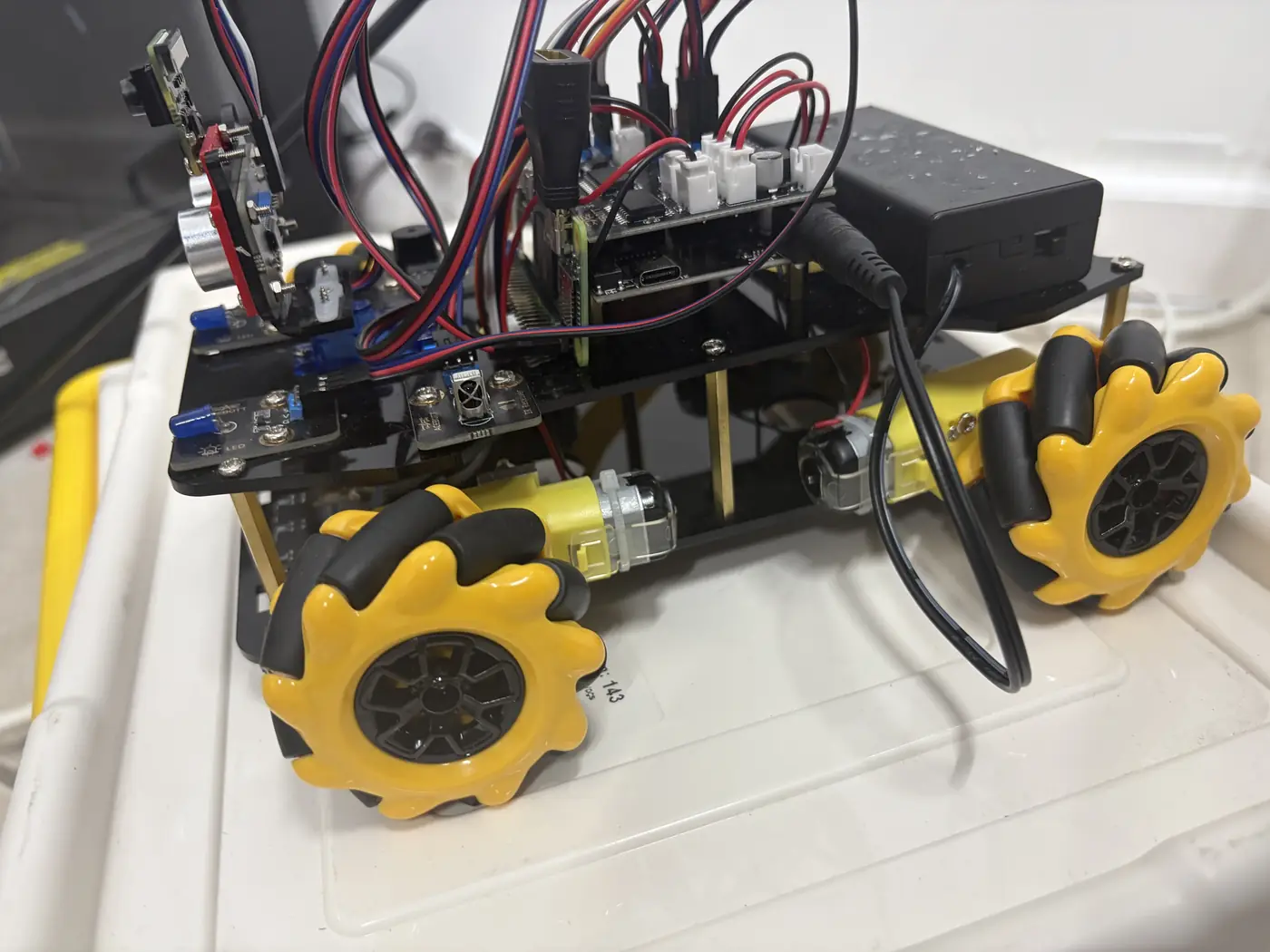
Testing: terrain traction + tread durability |
12/07/2025 |
In progress |
Rover test GIFs + wear notes |
Adjust tread thickness |
| Team |
Testing: camera mapping + blind-spot checks |
12/21/2025 |
Complete |
Camera mapping runs + blind-spot test notes |
Improve capture quality in dark tunnels |
| Team |
Presentation: storyboard + demo script |
01/05/2026 |
Planned |
Slides outline + demo checklist |
Add timing and transitions |
| Team |
Judging practice + final polish |
01/19/2026 |
Planned |
Q&A list + rehearsal notes |
Run full demo rehearsal |